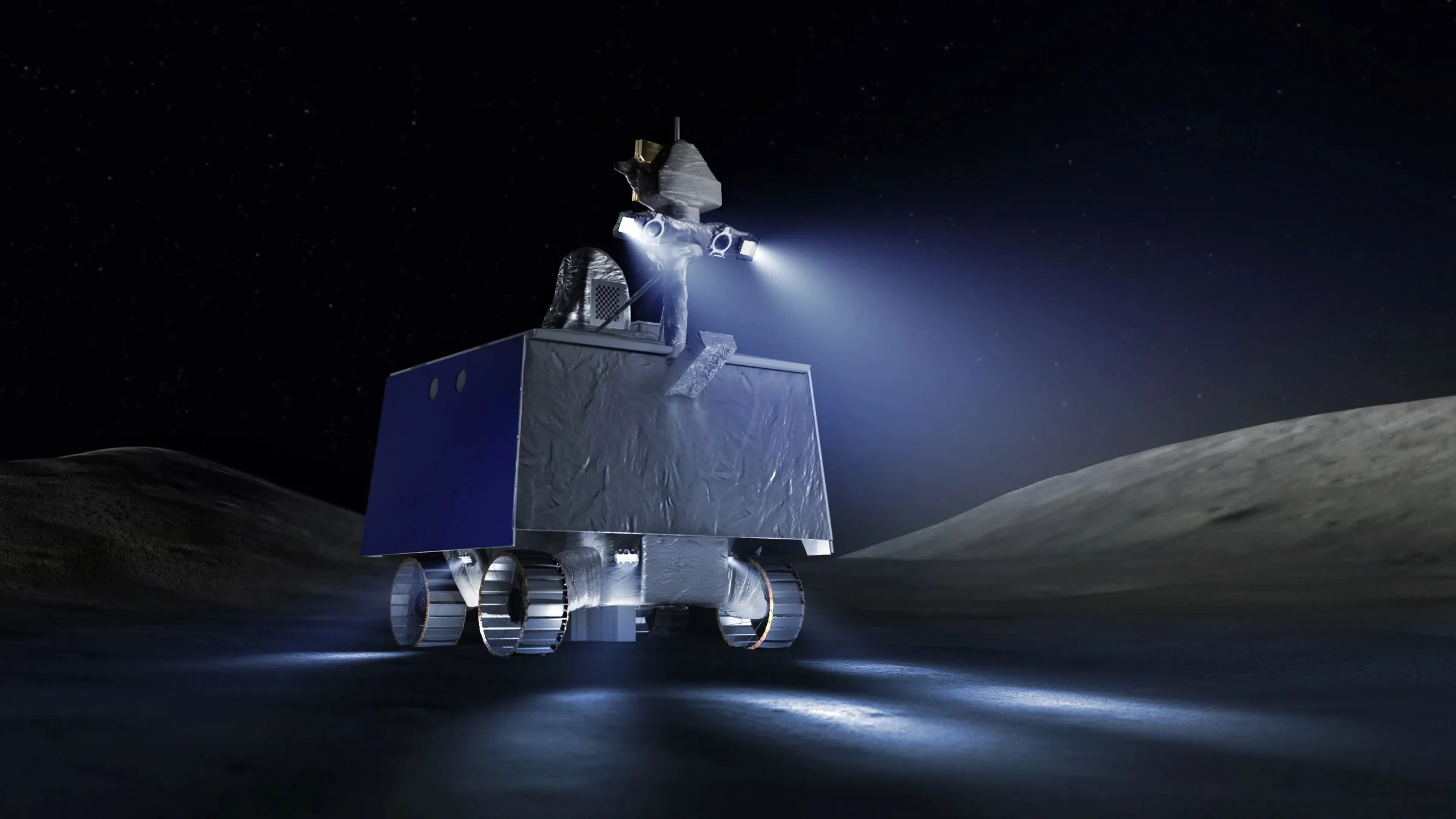
BISNISASIA.CO.ID, JAKARTA – Robot yang dikendalikan jarak jauh dapat membantu umat manusia menjelajahi bulan dan Mars.
Rovers yang dioperasikan secara teleoperasi mungkin segera digunakan di bulan, dengan pengendali manusia di Bumi yang mengendalikan alat rover secara virtual, sehingga memungkinkan ketangkasan yang lebih besar saat mengambil sampel, menggali, atau merakit.
Peneliti dari laboratorium robotika di Universitas Bristol, Inggris, telah menguji sistem teleoperasi baru mereka di Pusat Aplikasi dan Telekomunikasi Luar Angkasa Eropa (ESA) di Harwell, Oxfordshire.
Dengan mengendalikan simulasi virtual dari rover, mereka dapat menggerakkan lengan robot untuk menggali sampel regolith bulan palsu (disebut simulant).
Proses ini menghilangkan kebutuhan untuk umpan kamera, yang bisa tertunda karena adanya penundaan sinyal 1,3 detik antara Bumi dan bulan.
Sinyal antara pengendali jarak jauh dan misi robotik di bulan ke depannya dapat disalurkan oleh satelit yang merupakan bagian dari proyek Moonlight yang direncanakan oleh ESA.
“Simulasi ini dapat membantu kita mengoperasikan robot bulan dari jarak jauh, menghindari masalah penundaan sinyal,” kata Joe Louca dari Bristol dalam sebuah pernyataan.
Simulasi virtual ini juga menggabungkan interaksi “haptic”. Dengan kata lain, ini memberikan pengguna sensasi sentuhan, meniru sifat taktil dari regolith bulan dalam gravitasi rendah bulan.
Hal ini memberikan pengendali jarak jauh pemahaman yang lebih baik tentang seberapa banyak kekuatan yang harus digunakan untuk menggali regolith atau mengangkat sampel menggunakan sekop.
Saat ini, interaksi haptic baru diterapkan dalam versi virtual dari tugas-tugas dasar, seperti menekan regolith ke tanah atau menarik sekop melaluinya, tetapi belum untuk tugas yang lebih kompleks.
“Kami dapat menyesuaikan seberapa kuat gravitasi dalam model ini dan memberikan umpan balik haptic, sehingga kami dapat memberikan astronot gambaran tentang bagaimana debu bulan akan terasa dan berperilaku dalam kondisi bulan — yang memiliki gravitasi hanya sepertiga dari gravitasi Bumi,” jelas Louca.
Sistem ini juga dapat digunakan untuk melatih astronot yang mungkin suatu saat pergi ke bulan dengan memberikan simulasi realistis tentang apa yang diharapkan.
“Salah satu pilihan adalah mengizinkan astronot menggunakan simulasi ini untuk mempersiapkan misi eksplorasi bulan yang akan datang,” kata Louca seperti dikutip dari space.com.
Namun, sebelum itu bisa terjadi, Louca menyatakan ada masalah kepercayaan yang harus diatasi. Studi sebelumnya menunjukkan bahwa ada hambatan psikologis dalam mempercayai apakah sistem virtual yang sedang dioperasikan pengguna berfungsi sebagaimana mestinya di dunia nyata.
Tim Louca telah mengukur efisiensi dan keandalan sistem virtual mereka, menemukan bahwa saat mengambil simulant regolith, sistem ini efisien 100% dari waktu dan dapat dipercaya 92,5% dari waktu.
Menuangkan simulant dari sekop sedikit kurang dapat diandalkan, tetapi mereka menemukan bahwa dengan membatasi orientasi sekop saat membawa simulant, itu dapat dilakukan dengan lebih tepat.
Meskipun dirancang dengan bulan dalam pikiran, secara prinsip teknik teleoperasi yang sama juga dapat digunakan untuk misi ke Mars. Ini bisa sangat membantu dalam tugas menantang mengambil tabung sampel dari rover dan memuatnya ke kendaraan lain yang akan meluncur dari Mars dan membawa sampel kembali ke Bumi.
Seiring dengan anggaran dan jadwal proyek pengembalian sampel Mars NASA saat ini yang melambung, badan antariksa ini telah meminta industri untuk membantu mengembangkan solusi.
Rocket Lab baru-baru ini memenangkan kontrak untuk melakukan studi mendalam tentang kemungkinan solusi untuk mengambil sampel dari rover Perseverance, meskipun mungkin terlalu awal bagi teleoperasi untuk berperan.
Namun, misi pengembalian sampel dan eksplorasi lainnya ke bulan, Mars, dan badan berbatu lainnya seperti asteroid mungkin semua akan mendapatkan manfaat dari teleoperasi di masa depan.
“Dalam dekade berikutnya, kami akan melihat beberapa misi berawak dan tak berawak ke bulan, seperti program Artemis NASA dan program Chang’e China,” kata Louca.
“Simulasi ini dapat menjadi alat yang berharga untuk mendukung persiapan atau operasi untuk misi-misi ini,” katanya.